
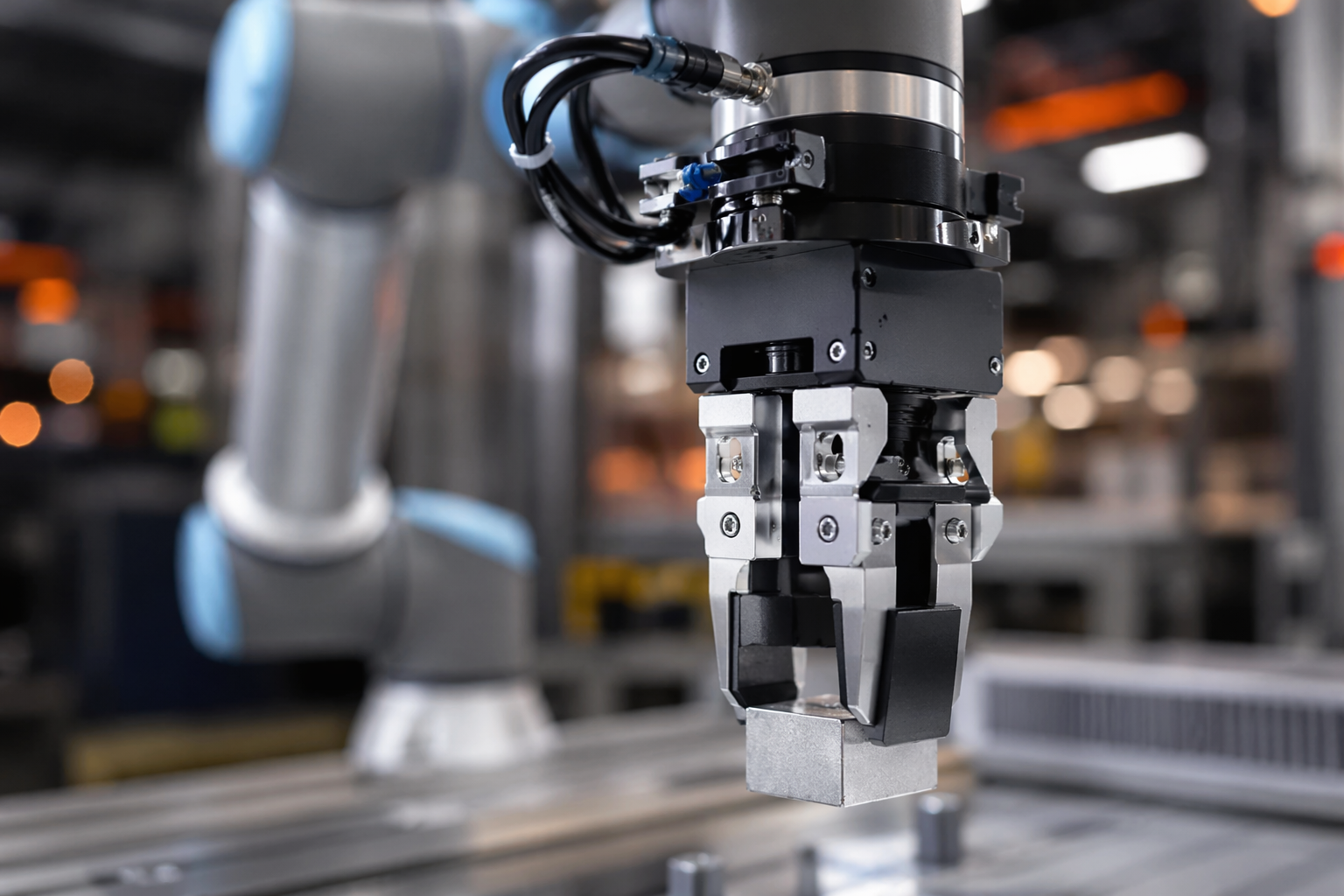
Gripper development is a critical part of every robotics and automation project.
The gripper is the contact point between the robot and the product, and therefore directly affects the precision, speed, reliability, and success of the entire system.
At All-Robots, we develop custom grippers for a wide range of industrial applications. Our solutions suit industrial robots, Collaborative Robots, Pick & Place systems, packaging lines, CNC, palletizing, sorting, quality inspections, material handling, and more. Purchasing a solution through us provides you with professional design, precise adaptation to real needs, and fast, professional service, according to the site’s product language.
Gripper development is a central component in every robotic system, enabling precise, stable, and efficient gripping of products in manufacturing and automation processes.
At All-Robots, we develop custom grippers for every application – from Pick & Place to complex projects – while improving performance, precision, and ROI.
Proper gripper development begins with understanding the product, process, industrial environment, and required performance. There is a significant difference between gripping cartons, plastic parts, food products, metal parts, glass, bags, electronic components, or heavy products. Therefore, in most cases, selecting an “off-the-shelf gripper” is insufficient; a solution must be designed to precisely match the size, weight, shape, fragility, work rate, and required precision level.
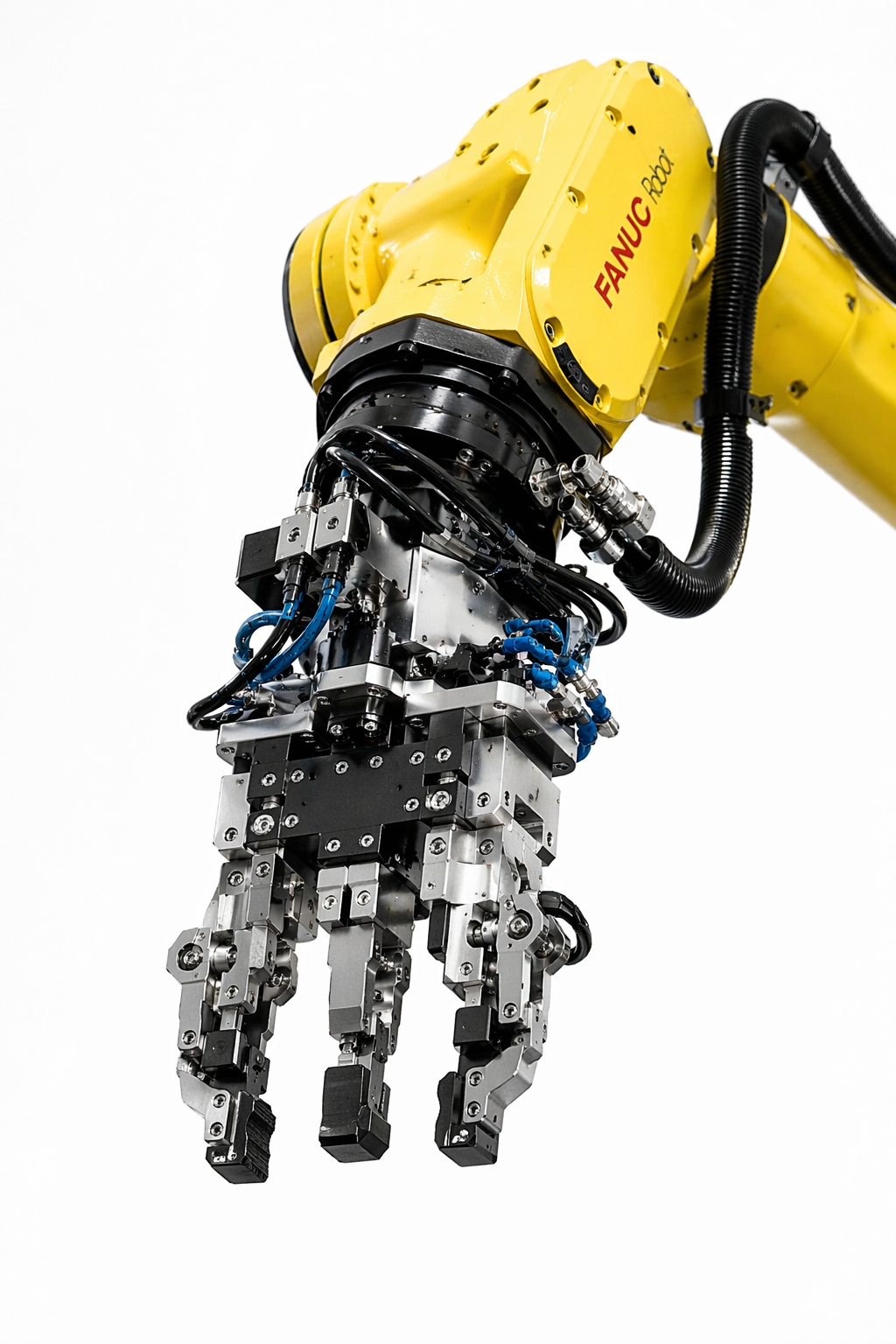
Grippers and EOAT are actually used in a very wide range of applications, including material handling, assembly, packaging, palletizing, machine tending, and other precision applications. Leading manufacturers in the field offer dedicated grippers for pick and place, CNC machine tending, material handling, assembly, packaging, palletizing, and even handling particularly delicate or heavy products.
At All-Robots, we know how to develop and adapt a wide range of gripping solutions, for example:
The choice between gripper types depends on the application itself. For example, vacuum grippers are particularly common in packaging, palletizing, and product handling, while finger grippers are very suitable for assembly, CNC, and material handling. Additionally, there are grippers designed specifically for harsh environments, heavy parts, or precise and delicate work.
Gripper development can suit almost any industrial application requiring gripping, moving, lifting, positioning, or releasing a product. Among others:
EOAT solutions and grippers are designed precisely for these worlds: automated material transport, assembly, packaging, machine tending, palletizing, and additional applications as needed.
When the gripper is designed correctly, the entire system works better. Additionally, it is possible to reduce failures, decrease wear, improve work rate, and create a more stable solution over time.
At All-Robots, we view the gripper not as an “end accessory,” but as a central part of project success. Therefore, we adapt the solution to the product, production line, rate, precision, work environment, and required complexity level. We know how to develop simple, smart, or highly complex gripping solutions, according to need.
Additionally, we know how to integrate the gripper as part of a complete system: robot, Collaborative Robot, vision system, conveyors, safety, control, existing machine, or complete automation cell. Our goal is not just to “grab a part,” but to build a solution that works correctly in the real world.
In summary, gripper development is one of the most important components in any successful robotic project. When gripping is designed correctly, it is possible to improve performance, increase stability, and build a much stronger automation system. Want to develop a gripper for your project? You can contact us through All-Robots and enjoy professional design, complete adaptation, and fast, professional service. According to the brand definition on the site, All-Robots presents itself as an advanced platform for robotics and automation solutions, combining professional consulting, advanced systems, and smart calculation tools to match precise solutions for every customer.
What is gripper development?
Gripper development is the process of designing and adapting a gripping system for a robot or Collaborative Robot, according to the product, process, and work environment. The goal is to enable stable, precise, and efficient gripping.
Is a custom gripper always necessary?
Not always, but in most cases a custom gripper provides better results. When dealing with non-standard products, high work rate, or precision requirements – custom adaptation is critical.
What types of grippers exist?
There are various types, including mechanical grippers, vacuum grippers, pneumatic grippers, electric grippers, and magnetic grippers. The choice depends on the product type and application.
For which applications is gripper development suitable?
Gripper development is suitable for almost any industrial process: Pick & Place, packaging, CNC, assembly, palletizing, quality inspections, and product handling.
Does the gripper affect robot performance?
Yes, directly. An unsuitable gripper can cause drops, slow work rate, and precision problems. A well-designed gripper improves the efficiency and reliability of the entire system.
How long does it take to develop a gripper?
The time varies according to project complexity. Simple solutions can be ready relatively quickly, while complex solutions require planning, testing, and adjustments.
Can a gripper be integrated with any robot?
In most cases, yes. Grippers can be adapted to industrial robots, Collaborative Robots, AGV systems, and various automation solutions.
Why choose All-Robots for gripper development?
Because we design solutions adapted to field reality. We combine experience in automation, robotics, and integration, and provide solutions that truly work — at all complexity levels.

{kind=link}
{kind=link}
{kind=link}